Первая очередь системы раннего обнаружения цунами на Дальнем Востоке России.
( автор - А.Ф. Ломакин)
В настоящее время краткосрочный прогноз цунами базируется на сейсмических данных о возможном возникновении, приходе и появлении волн на берегу при условии попадания эпицентра землетрясения в цунамигенную зону (зона уверенного предположения возникновения очага цунами), а энергия толчка достаточно велика, по крайней мере с магнитудой более 6,5 балла. Используя же разность во времени между скоростью распространения сейсмических волн и волн цунами (в 50- 100 раз), можно вычислить время прихода цунами к тому или иному пункту побережья. Таким образом, предполагая факт возникновения цунами свершившимся и зная время прихода волны к побережью, жители цунамиопасных районов Тихоокеанского побережья Дальнего Востока России заблаговременно предупреждаются о грозящей им опасности.
Однако, в силу недостаточной оправдываемости тревог, подаваемых только на базе сейсмических данных, в последнее время получили развитие дополнительные методы краткосрочного прогноза цунами (в частности, например, гидрофизического метода, основанного на непрерывных дистанционных наблюдениях с использованием мареографов открытого моря). В этом случае, когда волна цунами обнаружена на достаточном удалении от побережья, с помощью спутниковых каналов связи этот факт заблаговременно фиксируется в центре цунами, что дает возможность принять все необходимые меры для спасения людей. На практике получили признание и широко внедряются две системы раннего предупреждения цунами разработанные специалистами NOAA (США) и консорциумом специалистов ФРГ и Индонезии. Первая система получила название DART, а производство оборудования этой системы осуществляет компания SAIC США, вторая - GITEWS. Основная разница между заякоренными буями систем GITEWS и ДАРТ II связана со спутниковой передачей данных в центры цунами. Так, система GITEWS, используя только европейскую спутниковую систему, не может быть использована в Тихом океане, поскольку этот участок спутник не охватывает. ДАРТ II, напротив, использует глобальную спутниковую систему сотовой связи «Иридиум», активной в любой точке мира, включая и Тихоокеанский регион. По этой причине предпочтение в выборе системы для дальнего востока России отдано системе ДАРТ II (рисунок 1).
9 ноября 2010 года специалистами ДВНИГМИ совместно с инженерами американской компании SAIC в точке с координатами 42 град. 37 мин. северной широты и 152 град. 35 мин. восточной долготы установлен глубоководный датчик и поверхностный буй системы (рисунок 2). Развертывание первой очереди раннего предупреждения цунами в Тихоокеанском регионе РФ осуществлено в рамках реализации ФЦП «Снижение рисков и смягчение последствий чрезвычайных ситуаций природного и техногенного характера в РФ до 2010 года». Постановке буйковой системы предшествовали длительные переговоры с компанией SAIC США по вопросам производства и состава оборудования, его заводских испытаний и доставки в порт Корсаков, разработки плана постановки системы в заданной точке океана, организации открытого конкурса на заключение государственного контракта. Сложным вопросом оказался выбор места постановки системы. Так, с одной стороны необходимо выполнить условия функционирования донного датчика (это большие глубины), удаленность от зоны трансдукции (очаги землетрясений), расположением уже существующих соседних станций и временем добегания волны цунами до объекта защиты (г.Южно-Курильск, Южно-Сахалинск). По заданию ДВНИГМИ специалистами NOAA рассчитана и проанализирована карта времени добегания волны цунами при возможном очаге землетрясения на восточном побережье Тихого океана. На рисунок 3 представлены предпочтительные зоны постановки буйковой системы раннего предупреждения цунами для Дальнего Востока России. Выбранная точка постановки первой очереди системы позволяет в случае фиксации факта прохождения волны цунами заблаговременно, примерно за 20 мин., предупредить население г.Южно-Курильск и за 50 мин. – население прибрежных районов Сахалина.
На рисунок 4 представлена обобщенная схема работы системы раннего предупреждения цунами. Система состоит из трех основных подсистем: подсистемы поверхностного буя, подсистемы постановки буя на якорь и якорного устройства и Регистратор Донного Давления (BPR) или подсистемы цунаметра.
Подсистема поверхностного буя объединяет в себе корпус из пены ионосодержащего полимера с отсеком для электроники, подъемное кольцо, акустические модемы, радиолокационный отражатель и навигационный огонь, работающий на солнечных батареях. Отсек для электроники вмещает в себя систему Глобального Позиционирования (GPS), систему спутниковой связи Иридиум (Iridium), процессор для бортовой обработки информации, пакеты пластин аккумуляторов и другую электронику. При этом поверхностный буй имеет горячее резервирование (дублирование оборудования) по всем системам связи, питания и обработки данных.
Подсистема постановки на якорь включает в себя серьги, якорные скобы, якорную растяжку, цепь и якоря.
Подсистема BPR (цунаметра) состоит из якорной платформы, поплавковой системы, акустического размыкателя (для последующего возможного извлечения электроники BPR на поверхность), акустического модема, процессора, аккумуляторов, другой вспомогательной электроники и очень чувствительного датчика/ регистратора донного давления. Подсистема BPR устанавливается с поплавковой системой (десять стеклянных поплавков, защищенных кожухом). Эти поплавки крепятся к модулю электроники BPR, и как только акустический размыкатель отделяет якорь BPR от модуля, эти поплавки возвращают модуль электроники на поверхность для извлечения.
В системе раннего предупреждения цунами предусмотрена двухсторонняя связь по обходному каналу для устранения неполадок, изменения режимов работы и загрузки массивов данных с высоким разрешением. Донный датчик BPR имеет три режима работы: режим запроса, стандартный режим и режим события или цунами.
Установка подсистемы поверхностного буя произведена по схеме буй-якорь, донный датчик при этом поставлен на дне с расчетом свободной акустической связи в режиме реального времени.
На рисунок 5 представлена обобщенная схема работы системы раннего предупреждения цунами. Донный датчик измеряет давление столба воды каждые 15 сек. секунд с чрезвычайно высоким уровнем точности (0,5 мм). Одновременно с этим измеряется температура воды, которая используется для корректировки данных о давлении. Данные уровня океана в точке измерения используются в дальнейшем для распознавания характеристик цунами по специальному алгоритму в составе программного обеспечения, инсталлированного в процессоре BPR. С учетом фильтрации приливных и ветровых колебаний рассчитывается интенсивность низкочастотной составляющей колебания уровня океана, связанной с цунами. В случае превышения порогового значения высоты волны в 3 см подается сигнал угрозы цунами и система переводится в режим события (цунами). При этом, данные об уровне океана по акустическому каналу подаются с донного датчика на приемный акустический модем поверхностного буя, обрабатываются бортовым процессором (конвертируются в пакеты цифровых данных стандартного формата NOAA), затем через спутниковый канал связи Иридиум поступают на сервер Тихоокеанского центра цунами США NDBC, далее по специально выделенным каналам связи и с использованием протоколов IP/TCP передаются на серверы национальных центров цунами, в нашем случае в центр цунами ДВНИГМИ (Владивосток) и центр цунами СахУГМС (Южно-Сахалинск). Время прохождения сигнала от момента регистрации волны цунами в открытом океане до сервера любого центра цунами – не более 50 сек.
В нормальном режиме, донный датчик BPR фиксирует уровень океана непрерывно, однако процессор формирует пакет данных уровня с 15-минутным интервалом (четыре значения за час) и каждый час направляет на поверхностный буй такие короткие сообщения. Бортовой процессор поверхностного буя объединяет часовые сообщения в шестичасовые и направляет их в центр NDBC. Такой режим работы системы максимально экономит энергию батарей.
При включении режима цунами донный датчик BPR немедленно передает специальное сообщение поверхностному бую. Бортовой процессор донного датчика переходит в режим 15 сек. фиксации уровня океана и непрерывной передачи данных на поверхность. Бортовой процессор поверхностного буя также непрерывно передает 15 сек. данные в центр NDBC. После передачи данных об исходном событии цунами система продолжает передавать данные об уровне океана по предварительно запрограммированному временному сценарию в течении следующих 3 часов, после чего система возвращается к нормальному режиму работы.
Подсистема поверхностного буя предназначена для работы в течение, по меньшей мере, одного года без обслуживания, тогда как подсистема BPR предназначена для работы в течение, по меньшей мере, двух лет.
Развернутая система раннего обнаружения цунами в северо-западной части Тихого океана совместно с развернутой сетью уровенных наблюдений в дальневосточном регионе позволит своевременно и более достоверно предупредить население об угрозе цунами. Кроме этого, представляется возможность с учетом данных дистанционных телеметрических регистраторов цунами в прибрежной зоне верифицировать существующие модели прогноза цунами с целью снижения числа ложных тревог и оценки степени опасности цунами для конкретных пунктов побережья.

Рисунок 1. Поверхностный буй определения цунами DART,SAIC (STB)
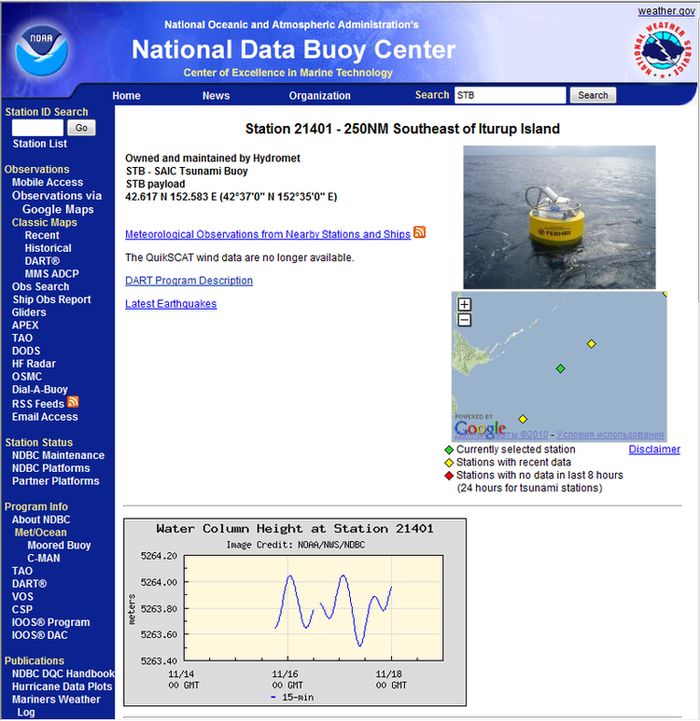
Рисунок 2. Станция 21401 (42°37′0″ N 152°35′0″ E)
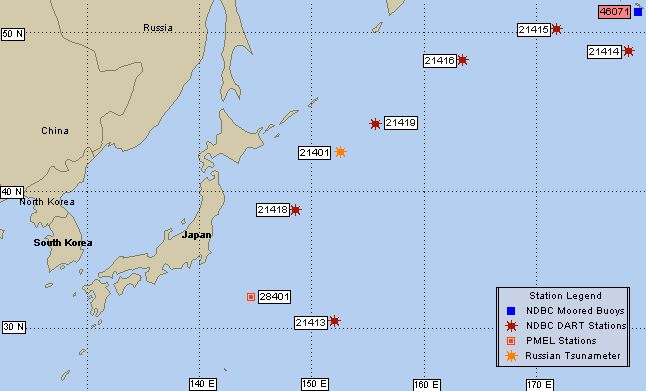
Рисунок 3. Northwestern Pacific Recent Marine Data, NOAA NDBC
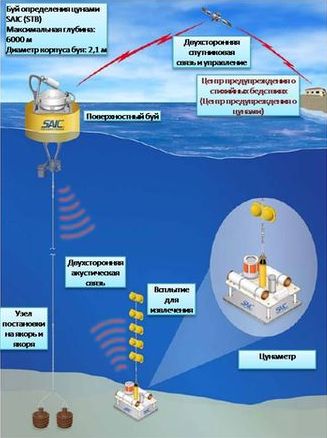
Рисунок 4. Система раннего предупреждения цунами SAIC (STB)
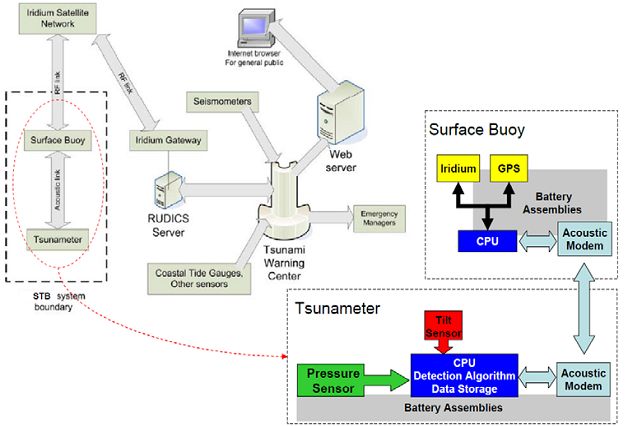
Рисунок 5. Схема архитектуры системы определения цунами
